|
Acquisition des donnťes aux entrťes : des capteurs au PIC
Nous allons maintenant nous intťresser ŗ un point important qui est l'acquisition des donnťes. Celle-ci a pour but de rťcupťrer les ťtages demandťs (poussoirs BP), et ťgalement d'informer le programme sur la position actuelle de l'ascenseur (capteurs C).
Ici, nous allons, avec l'aide du plan de c‚blage interne de la carte Pico-API que nous avons vu prťcťdemment, repťrer l'arrivťe des entrťes (poussoirs et capteurs), et regarder comment elles sont reliťes au PIC. Nous allons donc suivre le chemin du signal ťlectrique engendrť par líactivation díune entrťe.
Les entrťes Mais avant nous devons dťfinir quand est-ce qu'une entrťe est dite
active.
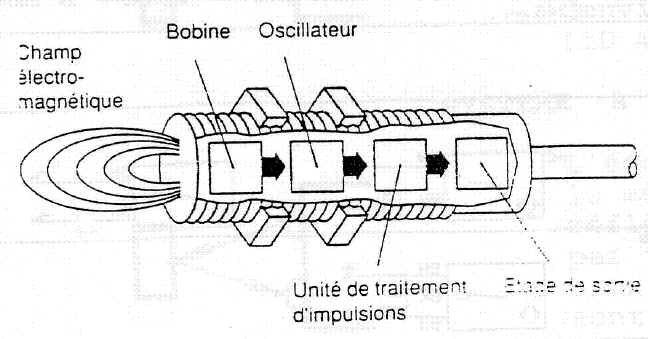
Les Capteurs : Mais que sont ces capteurs ? Un capteur est un ťlťment qui doit transformer une information physique, prťlevťe en entrťe, en une autre information physique, dite sortante et le plus souvent de nature ťlectrique. Cette derniŤre est la reprťsentation de la grandeur entrante et est utilisťe dans le but de la mesurer et/ou de commander un quelconque systŤme. Dans le cas prťsent, ces capteurs sont passifs, cíest-ŗ-dire quíils nťcessitent une alimentation extťrieure. Ici, ils servent ŗ dťtecter la prťsence de l'ascenseur ŗ n'importe lequel des quatre ťtages du systŤme. Ils sont díailleurs visibles sur la maquette, au niveau de chaque ťtage. Ils doivent se dťclencher lors du passage ou l'arrÍt de l'ascenseur devant eux. La solution qui est utilisťe est un ensemble de capteurs de type magnťtique (inductif). Ils ont un caractŤre dit de proximitť. Líascenseur est ťquipť d'un petit aimant. Sur la cage sont fixťs ŗ intervalle rťgulier, ŗ chaque ťtage les capteurs. Ils sont pratiques car ils ne nťcessitent pas de contact physique avec l'objet ŗ dťtecter. Ils renseignent donc sur le passage ou l'arrÍt de la cabine ŗ tel ou tel ťtage ; en effet, sa prťsence devant un capteur provoque la crťation d'une force ťlectromotrice variable dans la bobine.
Principe du capteur inductif
Le signal ťlectrique dťlivrť en sortie est de nature binaire de maniŤre ŗ Ítre aisťment exploitable : les capteurs sont donc du type TOR (tout ou rien). Soit il y a du courant en sortie (le capteur est alors ťquivalent ŗ un interrupteur fermť) ; soit le courant ne passe pas (et líinterrupteur est ouvert).
Le principe du TOR, Tout ou Rien
Dans ce systŤme, les capteurs ont une trŤs grande importance. Ils vont servir ŗ dťtecter les ťtages, et ceci dans le but, aprŤs traitement des signaux, de dťcider du mouvement de líascenseur (haut, bas, arrÍt), díafficher l'ťtage oý est positionnť le module, et d'allumer la D.E.L. correspondante ŗ l'ťtage concernť. Ils sont vraiment ŗ la base du montage. Par ce schťma nous pouvons d'abord voir que dŤs quíun capteur, ou un bouton, est activť, líeffet est celui díun interrupteur que líon ferme : le courant passe et atteint un optocoupleur.
Liaison entre maquette et carte PIC
Donc lorsquíil y a du courant, au niveau de Opto 1 et Opto 2, celui-ci passe par plusieurs rťsistances et diodes pour au final arriver au niveau de la DEL infrarouge de líoptocoupleur.
Principe de fonctionnement et rŰle díun optocoupleur Un optocoupleur est constituť díune DEL et díun photo transistor. Lorsque la DEL est alimentťe, elle ťmet un faisceau lumineux, ici des rayons infrarouges. Mais le photo-transistor est sensible ŗ ces rayons, et lorsquíil en reÁoit ŗ sa base, il se crťe un courant ťlectrique. Le photo-transistor se comporte alors comme un transistor classique et laisse passer le courant des points C ŗ E. Ce composant ŗ líavantage par rapport ŗ un transistor traditionnel díisoler líentrťe de la sortie. Ici, líoptocoupleur fonctionne en mode bloquť/saturť. Cela signifie que síil est saturť, se comporte comme un interrupteur fermť et laisse passer le courant, tandis que lorsquíil est bloquť, líinterrupteur est ouvert et le courant ne passe pas.
Principe de l'optocoupleur
Au final, si nous nous reportons au schťma ťlectrique ci-dessous, le passage du courant entre C et E indique un passage du courant entre M et N, et donc que le capteur est actif.
Zoom sur les entrťes
L'ensemble multiplexeur-PIC Pour continuer ŗ suivre le trajet du courant vers le PIC, nous allons maintenant voir une reprťsentation trŤs simplifiťe de la carte programmable, et en particulier de l'ensemble multiplexeur-PIC. On pourrait le schťmatiser tel que ci-dessous. Sur ce dessin, une seule entrťe et une seule sortie sont reprťsentťes. C'est un schťma de principe.
Ensemble Z
Tout díabord, nous allons nous intťresser ŗ líentrťe. Nous líavons vu, lorsque le photo-transistor est saturť, il se comporte comme un interrupteur fermť. Autrement dit, la tension entre ses bornes CE est nulle, car elle est alors ťquivalente ŗ celle aux extrťmitťs díun fil. En revanche lorsque le transistor est bloquť, CE est maximale. Le photo-transistor est ici reprťsentť par líinterrupteur k1. Or en schťmatisant líensemble de composants PIC + Multiplexeur par Z, on peut voir que líťtat en entrťe de Z dťpend du potentiel aux bornes de líinterrupteur. Lorsque celui-ci est au point haut, le niveau est ŗ 1 ; inversement lorsquíil est au point bas (ici nul), líťtat logique en entrťe est 0. Donc, lorsque líinterrupteur (le capteur) est activť, líťtat en entrťe de Z est 0, alors que lorsquíil est dťsactivť, líťtat est 1.
Mais intťressons-nous maintenant ŗ cette structure Z. Cet ensemble est composť principalement du PIC (PIC 16F84) et díun multiplexeur reliťs entre eux comme nous pouvons le voir sur ce schťma.
Zoom sur l'ensemble "Z" multiplexeur-PIC
Ainsi il faut voir que le PORTA du PIC est connectť au multiplexeur. Et nous allons donc nous intťresser aux ťchanges entre ces 2 entitťs en ťtudiant le fonctionnement du multiplexeur. On peut schťmatiser un multiplexeur comme ceci : D'un cŰtť les entrťes reliťes aux capteurs et poussoirs, de l'autre l'interface avec le PIC. 3 bits sont des entrťes, du PIC vers le multiplexeur, l'autre est une sortie du multiplexeur vers le PIC. A chaque entrťe E du multiplexeur correspond un code en binaire : 000 pour E0, 001 pour E1, 003 pour E2, etcÖ En fonction du code binaire reÁu ŗ ses entrťes ABC, le multiplexeur change líťtat de la sortie S. Celle-ci prend alors comme ťtat le complťment de líentrťe E correspondante au code reÁu sur ABC. En fait la sortie S est inverseuse, cíest pour cette raison que líťtat en sortie est le complťment de líťtat initial. Exemple : Lorsqu'on envoie l'information 000 aux entrťes ABC, c'est comme si le multiplexeur reliait l'entrťe E0 ŗ une inverseuse, elle-mÍme reliťe ŗ la sortie S. Si l'on envoie (000)2, le lien se fait avec E0. Avec (100)2, S prend la valeur binaire diffťrente de E8Ö Si E8 est ŗ 1, la sortie est ŗ 0. La nťcessitť díavoir un multiplexeur vient du fait que le PIC ne compte que 5 entrťes en PORTA, alors quíil en faut en minimum de 8. Mais de líutilisation du multiplexeur dťcoule donc un problŤme. Comme les entrťes BP et C ne sont pas reliťes directement au PIC, celui-ci ne peut savoir instantanťment et simultanťment líťtat des entrťes BP et C. Nous devons donc mettre en place une boucle dans le programme qui va scanner en permanence les entrťes l'une aprŤs l'autre. Donc, au niveau du PIC, A0, A1 et A2 sont des sorties reliťes ŗ A, B et C tandis que A3 est une entrťe reliťe ŗ S. Il s'agit donc d'envoyer aux sorties {A0, A1, A2} du PIC la valeur (000), de rťcupťrer líťtat de A3, puis díenvoyer (001), de rťcupťrer líťtat de A3, et ainsi de suite en boucleÖ Au final, aprŤs passage dans tous ces circuits, líťtat ŗ líentrťe du PIC correspond bien ŗ líťtat du capteur (1 ů activť et 0 ů inactif). Nous travaillons donc en entrťe en logique positive.
Le Programme Et maintenant voici la transposition de ces idťes en langage C, avec en premier la fonction scan() du programme qui síoccupe de rťcupťrer les informations en entrťes et que nous allons examiner.
Programme d'acquisition des donnťes
Zoom sur l'ensemble "Z" multiplexeur-PIC
Explications Cette fonction, lorsquíelle est appelťe par le programme principal, a pour rŰle de scanner líune aprŤs líautre les diffťrentes entrťes BP. La fonction continue de tourner en boucle [while(1) {}] tant quíune impulsion sur un bouton poussoir nía pas ťtť dťtectťe. A líintťrieur de cette boucle, une autre boucle [for (i=0 ; i<=3 ; i++) {}] est crťe, dont la variable i est modifiťe ŗ chaque tour. Elle contient ces instructions : PORTA=i; Le PORT A prend alors la valeur de i, qui varie de 0 ŗ 3 en dťcimal, donc de (000) ŗ (011) en binaire. En modifiant ce PORT A, on modifie donc les entrťes A, B et C du multiplexeur, qui va indiquer en sortie S líťtat du poussoir Ei ce qui modifie A3. Il nous suffit ensuite de lire cette valeur. Líopťration qui donne la variable entree síappelle un masquage. On dťtaillera le masquage plus loin lorsquíon parlera des sorties. Ici, il faut savoir que cela permet díextraire du PORT A líťtat du seul bit A3. Donc entree rťcupŤre une valeur, soit ťgale ŗ 0, soit diffťrente. Par la suite on analyse donc cette donnťe : if (entree!=0) {poussoir=i;} Nous líavons vťrifiť dans les paragraphes prťcťdents, nous travaillons bien en logique positive en entrťe ; donc si entree vaut 0, alors le poussoir BPi est dťsactivť, tandis que si entree est diffťrente de 0, cíest que BPi est actif et poussoir prend la valeur du numťro du BP. Toutefois, nous nous sommes posťs la question, quíarrive-t-il si líon appuie sur deux boutons en mÍme temps ? Il y avait deux options : soit líun ťtait privilťgiť et celui-ci aurait alors ťtť celui qui ťtait scannť ŗ ce moment ; soit on interdisait cette possibilitť. Et cíest cette derniŤre option que nous avons choisi. Si plusieurs poussoirs sont appuyťs en mÍme temps, aucun níaura de rťponse. Ceci a ťtť rendu possible par líajout díune variable supplťmentaire dejaBP. Celle-ci síoccupe de comptabiliser le nombre de poussoirs reconnus comme actifs lors díun cycle de la boucle while(1) {}. En fait, elle est remise ŗ 0 ŗ chaque cycle de cette boucle, et est incrťmentťe de 1 chaque fois quíun BP est dťtectť actif. A la fin de la boucle, il suffit alors de poser cette condition : if (dejaBP==1) {return poussoir;} Ainsi, si un seul poussoir actif a ťtť dťtectť, on retourne la valeur de líťtage demandť, et si aucun ou plusieurs sont dans ce cas, la fonction ne retourne pas de valeur et re-boucle afin de dťmarrer une nouvelle pťriode de dťtection.
La fonction que nous venons d'ťtudier ne traitait que des boutons poussoirs, mais la mÍme technique est utilisťe pour rťcupťrer l'ťtat des capteurs.
|